Vor ein paar Tagen ist etwas spannendes passiert: Ich habe mein
allererstes Embedded System wiedergesehen - eine nach nunmehr ca. 34
Jahren defekte Schrittmotorsteuerung für die Teleskope der
Volkssternwarte Rothwesten,
die ich in den Sommerferien in der 12. Klasse gebaut habe. Schaut man
sich die Entwicklung von damals bis hin zu unseren aktuellen
industriellen Embedded Systems an, wird schnell klar, warum sowas heute
nur noch mit Open Source Software sinnvoll beherrschbar ist.
So ging's los
Aber erst mal zurück zum Anfang: Irgendwann in den frühen 90ern kam die
Zeit, wo in der Schule auch mal ein paar spannende Themen an die Reihe
kamen, und das waren für mich vor allem die Elektronik- und Astronomie
AG. Und so kam auch schnell die Idee auf, ob man das nicht unter einen
Hut bringen könnte.
Montierung, 30 cm Newton, 20 cm Newton, Leit-Refraktor der
Volkssternwarte Rothwesten
Auf der
Volkssternwarte Rothwesten,
wo seinerzeit regelmäßig öffentliche Führungen machte, ging
irgendwann der alte Plattenspielermotor zum Antrieb der
Teleskopmontierung kaputt, und schnell war die Idee da, ob man da nicht
was modernes, mit Microcontroller für basteln könnte.
Hardware
Ich glaube, es war 1990, als ich mich dann in den Sommerferien gemeinsam
mit einem kundigen Familienmitglied hingesetzt haben und die
Schrittmotorsteuerung im Bild oben entwickelt habe.
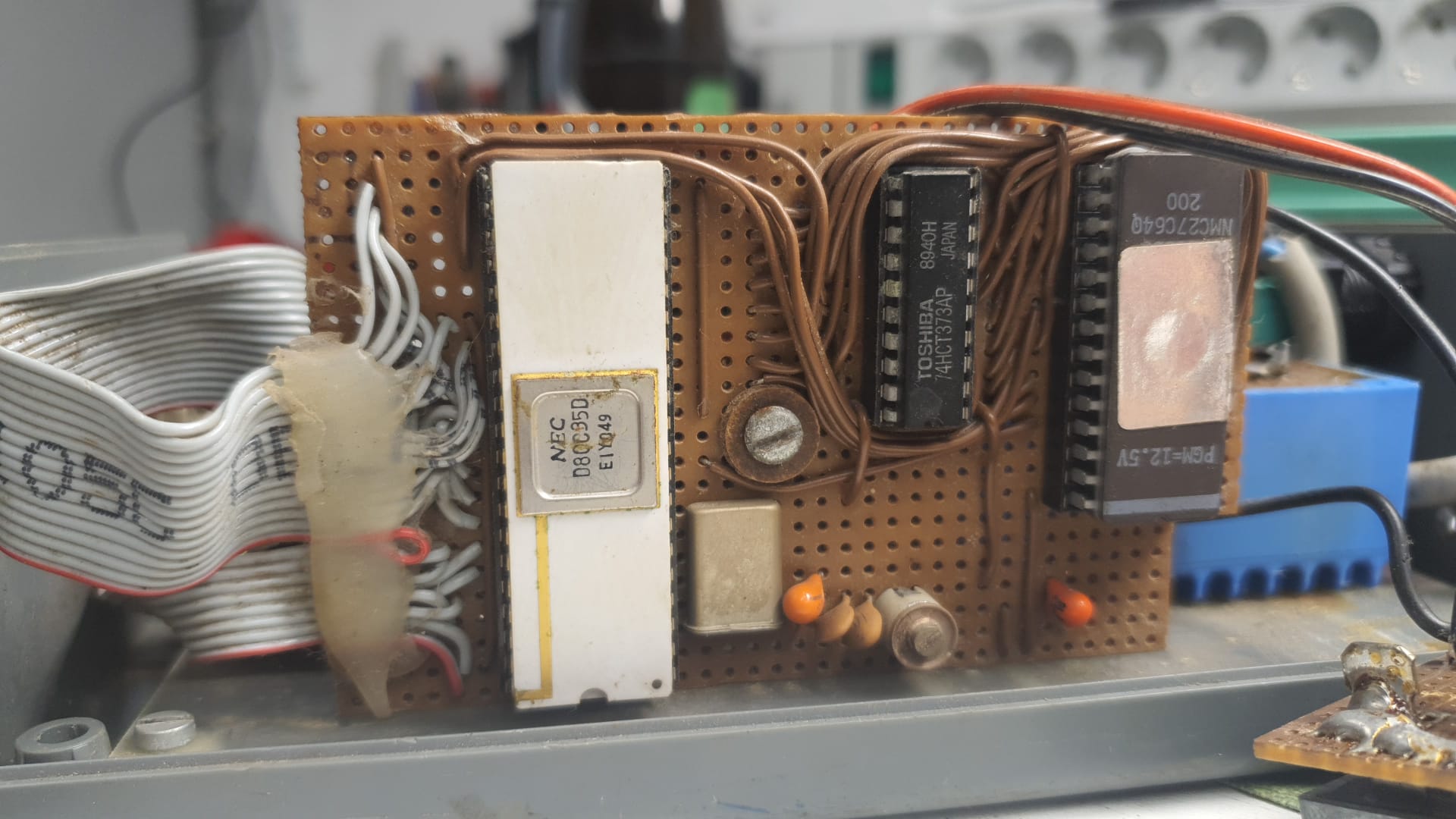
CPU-Platine der Schrittmotorsteuerung
Der Prozessor ist ein 8035, ein Vorläufer des 8051, der nur addieren
und schieben konnte. War halt ein 8-Bitter, der 4 KB externes ROM
adressieren konnte.
Hochsprache war viel zu ressourcenaufwändig, und so entstand das
Programm direkt in Assembler. So ein 8-Bitter hat halt auch nur 256
Befehle, die kann man alle auf DIN-A4 ausdrucken und über den Monitor
kleben. Irgendwo fand sich dann noch ein handkopiertes Prozessor
Manual, in dem die Befehle näher erklärt waren.
Damit man das externe EPROM anbinden konnte, musste der Adress- und
Datenbus mittels eines Latches getrennt werden, das macht das 74HCT273
auf dem Bild.
EPROMs programmieren ging mit dem Commodore 128, da hatte ich eh
schon ein EPROM-Programmiergerät aus der 64er nachgebaut. Als
Schreibschutzaufkleber dienten handelsübliche
Disketten-Schreibschutzaufkleber, die waren lichtdicht genug.
Und auch In-System-Programmieren ging schon: Dazu gab's auch aus
irgend einer Computer-Zeitung (war's die c't, oder die MC, oder
elrad?) einen EPROM-Simulator mit Parallelport und RAM.
Platine ätzen war viel zu aufwändig, wenn man einen Fehler gehabt
hätte. Also, Lochrasterplatine und die Busse von Hand verdrahten.
Alle ICs waren natürlich gesockelt, damit man die im Fehlerfall auch
schnell tauschen konnte.
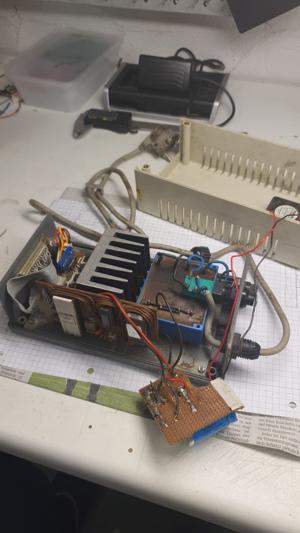
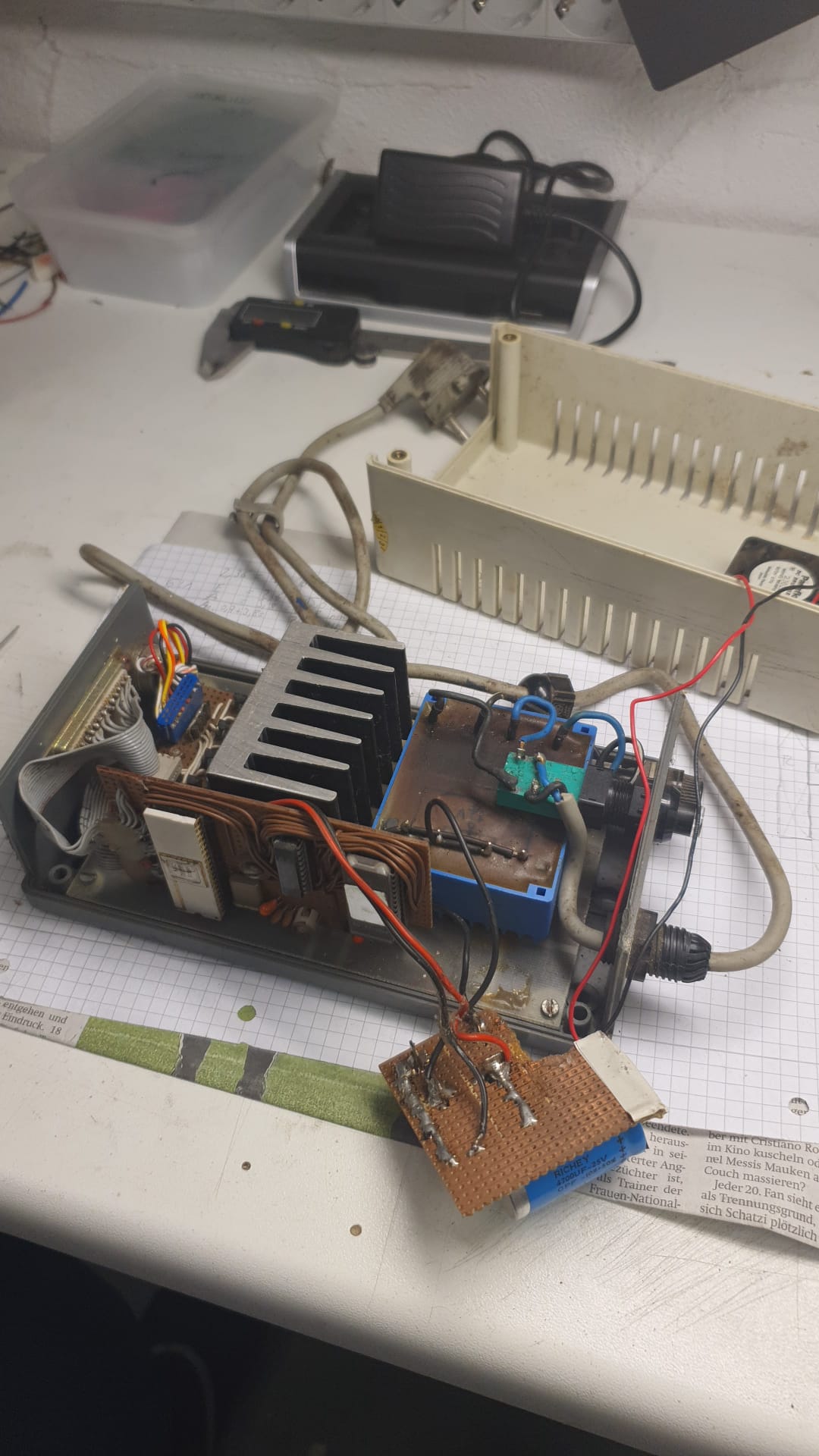
Außen drumherum ist dann noch ein längsgeregeltes Netzteil mit Trafo für
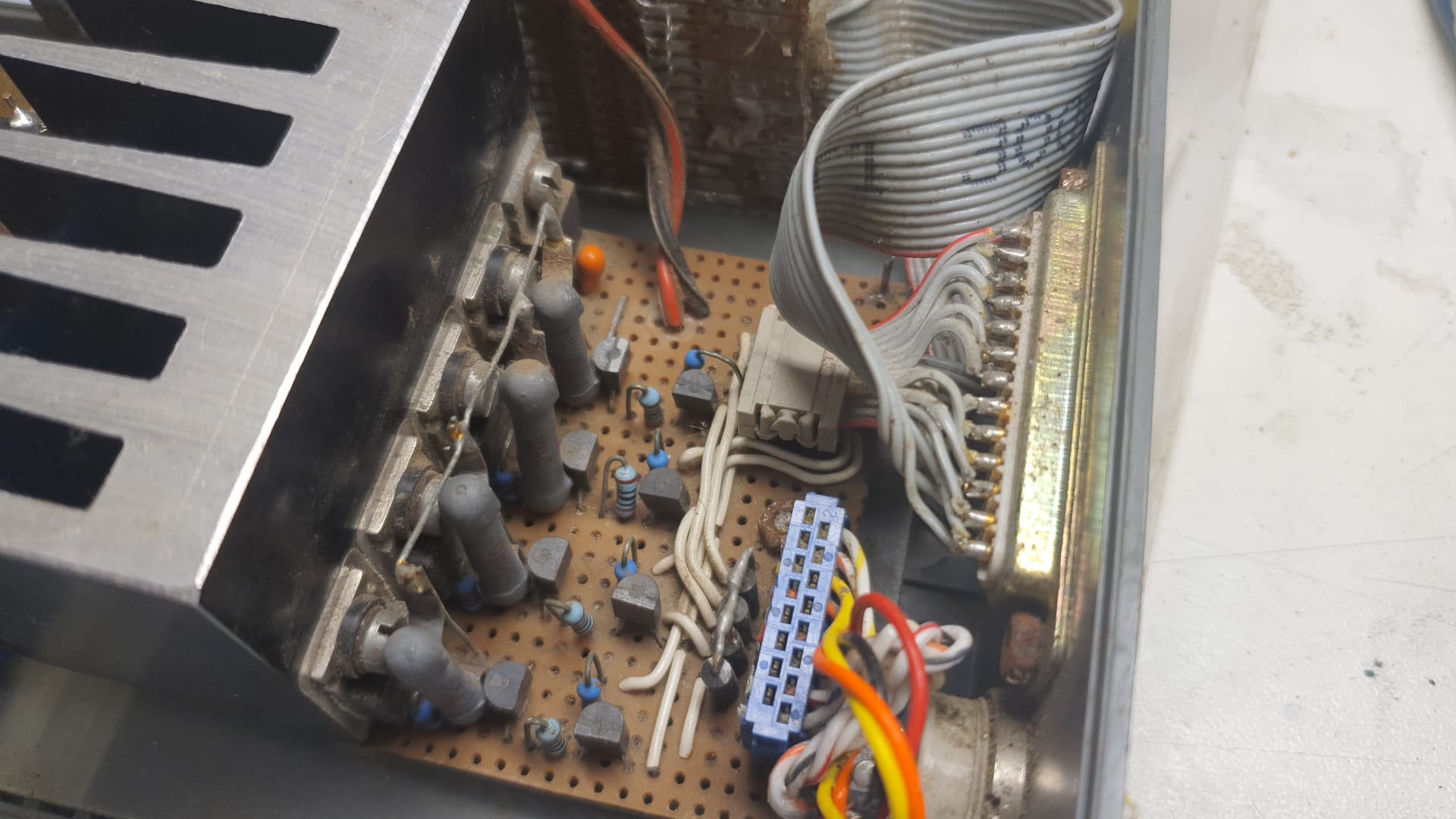
die Spannungsversorgung, eine FET H-Brücke zur Ansteuerung der
Motorwicklungen, ein Bopla-Gehäuse vom Völkner in der Nachbarstadt und
ein Kabel zur Handsteuerbox, die man mit an den Okularauszug nehmen
konnte.
EPROM mit Floppy-Schreibschutzaufkleber
Steuerung im Gehäuse
H-Brücke zur Ansteuerung der Spulen
Software
Nachdem die Hardware die ersten Assembler-Hello-Worlds zufriedenstellend
ausgeführt hat, ging es an die eigentliche Software. Schrittmotoren
wollen passende Muster auf ihren Spulen sehen, da mussten Tabellen
erzeugt werden, die man mit ein bisschen Pointer-Arithmetik im Kreis
herum abarbeiten konnte.
Das Timing musste präzise eingehalten werden: So ein Teleskop muss sich
in einem siderischen Tag (23 Stunden, 56 Minuten) ein mal um seine Achse
drehen. Für mehrere Stufen "schneller" und "langsamer" Tasten mussten
die Taster der Steuerbox abgefragt und die Geschwindigkeiten angepasst
werden. Das ganze ist extrem feinfühlig, schließlich erlauben die großen
Geräte Vergrößerungen bis zu ein paar hundertfach, so dass jede
Ungenauigkeit gleich zu Ruckeln führt. Für die Sonnen- und
Mondbeobachtung gab es angepasste Geschwindigkeiten, noch ein paar LEDs
zur Status-Rückmeldung, und schließlich noch logarithmische
Beschleunigungsrampen für smoothe Geschwindigkeitsübergänge.
Komplexität damals und heute
Am faszinierendsten finde ich aus heutiger Sicht eigentlich, dass das
Gerät überhaupt 34 Jahre durchgehalten hat, bei Sonne, Winter, Sturm und
Regen, überhaupt bei all diesen extremen Temperatur- und
Feuchtigkeitsverhältnissen, die auf so einem exponierten Turm auf dem
Rand eines Vulkankraters herrschen. Und das im IP54 Gehäuse, quasi ohne
jeden Schutz.
Spannend ist natürlich, dass die Technik damals so wenig komplex war,
dass man die als Zwölftklässler irgendwie innerhalb der Sommerferien in
den Griff bekommen konnte - ohne Internet. Ein bisschen Löten,
Drähtchen, eine Seite Befehlssatz, viel mehr brauchte man nicht und
konnte sich sofort auf das fachliche Problem konzentrieren.
Und dann schaue ich mir heute die aktuellen Prozessoren an, die wir bei
Pengutronix in unseren Industrieprojekten so tagtäglich in der Hand
haben und die oftmals 15 bis 30 Tausend Seiten Dokumentation haben, mit
Secure Boot, mit Ethernet, mit Power Management und jede Menge komplexer
Software-Technologien. Die bis in die letzte Ecke ausgefeilt und so
speziell sind, dass es auch bei uns keine Einzelpersonen mehr gibt, die
das alles hinreichen bis in jede Ecke beherrschen, sondern eine Vielzahl
an Experten für jedes noch so kleine Teilgebiet.
Da fragt man sich schon, wie wir damals eigentlich fachliche Probleme
lösen konnten - wir hatten ja nüscht! :-) Aber natürlich hat sich das
Umfeld auch massiv geändert, so dass es ohne Vernetzung, Funktechniken,
IT-Security usw. heute bei vielen Systemen gar nicht mehr geht. Und dann
steigt natürlich sofort massiv die Komplexität.
Damals wie heute war aber das wichtigste: Zugang zu offener
Dokumentation. Man kann und konnte lernen, wie das alles funktioniert,
und man kann und konnte Leute fragen, die sich damit auskennen. Heute
haben wir Linux und jede Menge Open Source Komponenten, die erst mal
einfach so funktionieren und die Hardware so weit zum Leben erwecken,
dass man als Anwender auch auf diesen komplexen Boliden sich auf seine
Anwendung konzentrieren kann.
Und Damals wie heute musste man die richtigen Leute kennen, die sich mit
sowas auskennen und denen man ein Loch in den Bauch fragen konnte. Danke
an Ingeborg Reuter, Peter Kirchhoff und Martin Dietz, die das damals für
mich möglich gemacht haben. Und Danke an mein großartiges Team bei
Pengutronix, dass all diese Sachen heute möglich macht - für mich und
für alle, die unsere Ergebnisse im Linux-Kernel und all den anderen
spannenden Open Source Projekten einfach so nutzen können!
Übrigens: Das schnell herbeigeschaffte Ersatzsystem für die kaputte
Schrittmotorsteuerung hat der Kollege in Rothwesten über's Wochenende an
den Start gebracht, mit ESP32 und damit auch wieder mit einem Open
Source Ökosystem mit ganz viel offenem Wissen. Aber das ist eine andere
Geschichte...
Wir nehmen das Linux-7.0-Release zum Anlass, uns anzuschauen, was Pengutronix in den letzten zwei Monaten zu verschiedenen Open-Source-Projekten beigesteuert hat.
Wir nehmen das Linux-6.19-Release zum Anlass, uns anzuschauen, was Pengutronix in den letzten drei Monaten zu verschiedenen Open-Source-Projekten beigesteuert hat.